




摘 要
随着我国油茶栽植面积不断扩大,油茶果采收装备缺乏已成为制约油茶产业可持续发展的主要问题。当前,油茶果采收装备存在采收效率低、采净率低、花苞损伤率大等问题,亟须研制适合我国栽植模式的采收装备,加快油茶果采收机械化进程。笔者对国内油茶果采收装备进行研究,按照机械化程度将现有油茶果采收装备进行分类,重点阐述不同油茶果采收装备的适用范围、工作原理及优缺点,对采摘执行器技术、采收机械臂技术、采收动力底盘技术进行分析论证,剖析智能化采收技术研究进展及目前存在的问题。针对我国现有油茶栽植面积大、模式不规范、立地条件困难、采收劳动强度大、机械化采收困难的现状,分析油茶果机械化采收面临的主要问题。认为林机林艺融合度低、关键技术研究不足、关键参数研究匮乏是制约油茶果采收机械化发展的关键,并提出了开展多种机型适配多场景采收技术研究、林机林艺深度融合的高效采收技术研究、加强理论和关键技术研究、智能化前沿采收技术探索等发展建议。
油茶是适宜栽植在丘陵山地的木本油料作物,具有“不与农争地、能为人供油、能为山增绿”的独特优势。据统计,目前我国粮油自给率仅为30.1%。大力发展油茶产业,提高粮油自给率,是保障国家粮油安全、缩小城乡收入差距的重要途径。
《“十四五”林业草原保护发展规划纲要》明确提出,“到2025年油茶种植面积达到600万hm2,年产茶油200万t”; 《中共中央 国务院关于做好2022年全面推进乡村振兴重点工作的意见》明确提出“支持扩大油茶种植面积”。
我国80%以上的油茶栽植在丘陵山地,立地条件差,且油茶具有花果同期的生物特性,国内外成熟先进的林果采收装备不适于采收油茶果; 加之缺乏宜机化栽培模式和宜机化抚育管理方式,导致油茶果机械化采收异常困难,仍以人工采收为主。
随着城镇化和工业化的加速发展,人口老龄化程度加剧,用工难等问题不断显现,人工采收效率低、成本高,严重影响了油茶栽植的积极性,限制了我国油茶产业规模化发展。机械化采收是油茶产业可持续发展的必然趋势,已成为行业关注的热点。
现阶段整体机械化采收技术水平薄弱,研制和推广油茶果采收装备具有重要的意义。近年来,国内学者从“高效、实用、省力”等角度出发,开发了不同种类的油茶果采收装备,促进了机械采收技术发展。
国家林业和草原局哈尔滨林业机械研究所汤晶宇、周建波等按照机械化程度将油茶果采收装备进行分类,梳理了现阶段我国油茶果采收技术装备的研究进展,提出了机械化采收面临的问题,并对油茶果采收技术发展提出建议,以期为其研发提供参考。
01油茶果采收装备分类
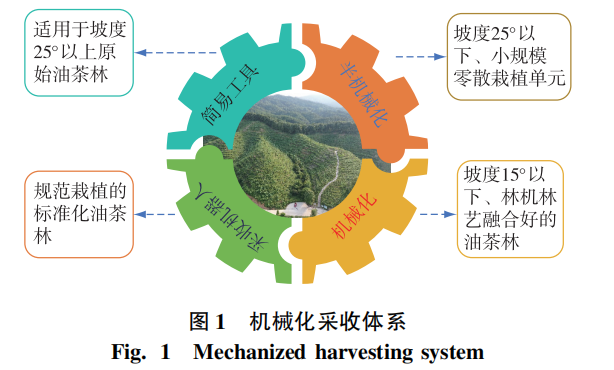
油茶果采收装备按照机械化程度可分为简单工具、半机械化采收装备、机械化采收装备和采收机器人。针对不同场景应用不同采收装备,构建机械化采收体系(图1)。
1.1 简易工具
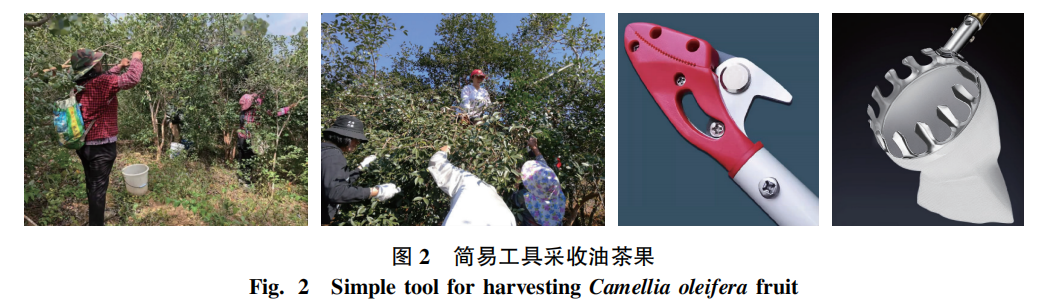
简易工具是指竹竿、摘果剪、摘果器、背篓等辅助工具(图2)。通常用于树体高大、栽植不规则、株行距小的原始油茶林。人手所能触碰范围内的油茶果直接采摘,范围之外的则使用简易工具,缺点是采收效率较低、劳动强度大、易损伤花苞和枝条。
1.2 半机械化采收装备
半机械化采收装备是指人工辅助机械进行采收的装备,主要有采摘装置和收集装置。
1.2.1 采摘装置
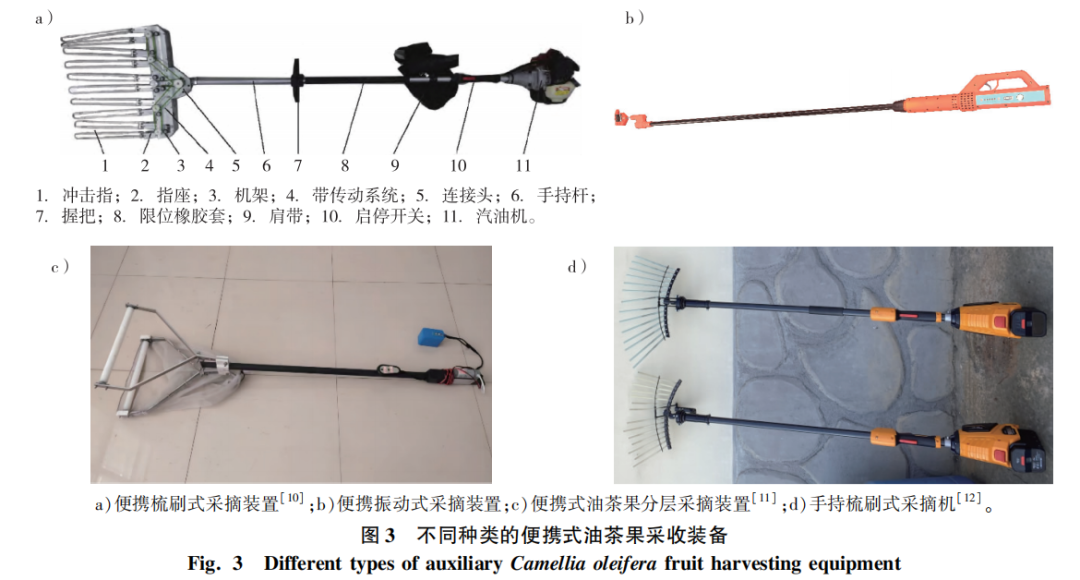
闫锋欣等研制了一种手持冲击梳刷式油茶果采摘装置(图3a),通过冲击指与油茶果碰撞使其脱落,并开展了林间试验,结果表明,该装置满足高油茶果采净率和低花苞损伤率的要求。浙江三响好农业科技有限公司研发了一种便携式油茶果采摘装置(图3b),采用曲柄连杆机构产生激振力使果实脱落,并验证了可行性,采收效果较好,现已小批量生产。李庆松等设计了一种便携式油茶果分层采摘装置(图3c),采摘效率是人工的3倍,提高了作业效率。饶洪辉设计了一种便携式油茶果实采摘装置,不损害枝叶,还能起到省时省力的作用。浙江理工大学杜小强团队研制的一款手持梳刷式采摘机(图3d),果实采净率≥90%,花苞损伤率≤5%,保证采摘效率,减轻劳动强度和人工成本,实现“落果保花”。以上采摘装置具有适应复杂作业条件能力强、操作简单、成本低等特点。
1.2.2 收集装置
收集是油茶果采后高效集中的最重要环节。合理的收集装置能减轻人工劳作强度,降低采收机的整体质量,提高采收效率,收集装置主要包括收集篓、倒伞收集、伸缩布收集等。
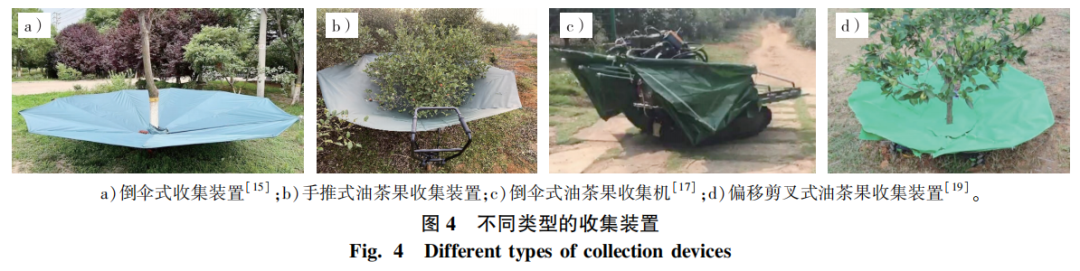
薛晨阳等设计了半弧式伸缩油茶果收集装置,拟解决油茶树体交叉,倒伞收集不易开伞问题,在试验过程中由于枝条下垂、枝下高较低,存在伞布无法伸入树下的情况。饶洪辉等为解决成熟油茶果自然掉落无法及时收集造成浪费的问题,设计了简易油茶果收集装置,既能配套油茶果机械采收装备使用,又能单独对自然掉落的油茶果进行收集。潍坊海林机械有限公司研发的一款倒伞式收集装置(图4a),整机直径可达到5.8 m,操作方便,成本低。浙江理工大学研制的一款手推式油茶果收集装置(图4b),整机质量15 kg,伞面直径约3 m,适用于立地条件复杂、栽植模式不一的丘陵山区果园。马卫兵发明了配合簸箕完成收集工作的收集装置,适用于复杂地形的油茶果收集,装置简单,但对树体有一定的要求。张赵杰研发了一种倒伞式油茶果收集机(图4c),收集面展开时间约2 s,能够完成油茶果收集作业。王文密为解决背篓装满油茶果受到晃动会溢出的问题,设计了小开口的油茶果收集装置。李正超等发明了偏移剪叉式油茶果收集装置,采用变比例剪叉单元分别设计水平环形剪叉机构和竖直剪叉机构,实现林果收集装置的折展运动,并进行了林间试验,效果较好(图4d)。王方阔等发明了一种简易呈碗状的油茶果收集装置,由两个左右对称的碗体结构组成,中间通过连接装置连接,左右碗体底部分别预留便于人工收集的收集窗口,装置底部预留一个圆形开口用来容纳树干。以上收集装置操作简单、制作成本低,对树体的损伤较小,但在实际应用中出现难以打开、相比机械化采收装备作业效率低等问题。
综上所述,半机械化采收装备主要应用于生长在坡度25°以下、小规模零散栽植、管护质量差的油茶林或未经改造的老油茶林采收场景,在一定程度上能有效辅助人工、提升工作效率,研发及推广是对油茶果采收装备多场景应用的有力补充。开发半机械化采摘器、轻简收集器等是适配当前栽植模式的研究发展方向。
1.3 机械化式采收装备
我国油茶果机械化采收装备研究从21世纪初逐渐开展,总体技术装备成熟度不高,应用范围不大。笔者按照不同采摘原理分析了振动式、胶辊式、梳式等油茶果采收装备。其中,振动式采收机研究较多,具有较高的采收效率和采净率,振动对树根、树干和树枝等树体影响的优劣鲜见科学评价; 胶辊式采收机采用两组胶辊同步反向旋转夹持油茶果脱离树枝实现采收,对树体内部的油茶果采净率较低; 梳式采收机结构简单,但工作过程中梳齿易与树枝缠绕。胶辊式、梳式采收效率相对振动式低。
1.3.1 振动式
振动式油茶果采收通过对树干或树枝施加特定频率、振幅的激振力,果实随树体受迫振动,当惯性力大于果柄结合力时,果实掉落。影响振动式采摘效果有多种因素,如:频率、振幅、夹持位置等。果柄结合力大小反映了油茶果与果柄直接分离的难度,是影响油茶果机械化采收效率的重要因素,品种和成熟度也会对振动采收效果造成影响。
振动式林果采收是国内外林果机械化采收应用最主要的方式,具有结构简单、激振力大等特点。国内学者对油茶果的机械化振动式采收做了大量工作,根据作用对象可分为振动树干式和振动摇枝式等。
1)振动树干式。振动树干式是夹持树干进行振动的采收装备,王东等在对油茶种植区域和植株特性进行分析之后,设计了一种多自由度振动树干式油茶果采收机(图5a)。整机采用多自由度采收作业臂,可调整采摘头与树干之间的相对角度来完成不同位置的油茶果采收。国家林业和草原局哈尔滨林业机械研究所研制的梯田悬臂式油茶果采收机(图5b),适合在梯田等复杂立地条件下作业,采收臂可伸缩、折叠、旋转,实现一次驻机多位置采收。轻简式油茶果采摘机(图5c),适用于坡度15°~25°复杂地形的油茶果采收,具有体积和质量小、通过性好、采净率高等特点。程学良等建立采摘机-果树振动系统动力学模型,分析了不同夹持高度对树干振动式采摘效率的影响。高自成等设计了一种悬挂振动树干式油茶果采摘机(图5d),试验表明,落果率随采摘频率和加持高度的增加而增加,落花率随采摘频率的增加而增加,随夹持高度的增加而减小。林益平等设计了一种基于多连杆机构的油茶果采摘机,整机能够正常运转,但安全系数小,需要优化设计。
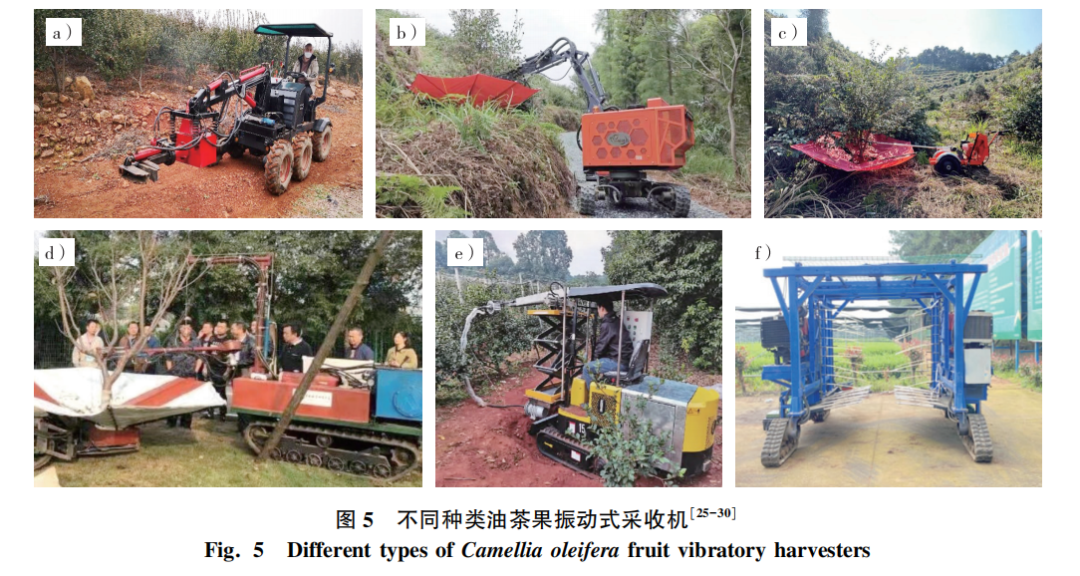
2)振动摇枝式。振动摇枝式是以油茶枝条为作业对象进行振动的。伍德林等为探究振动参数对油茶果采收的影响,建立了油茶“果实-枝条”双摆动力学模型,通过对树冠进行振动采收试验,得出油茶果采净率和花苞损伤率的影响因素,设计了摇枝式油茶果采摘机(图5e)。通过三因素三水平正交试验,得出了最佳工作参数,基本符合采摘要求。杜小强等设计了可连续振动落果和收集的履带式高地隙油茶果振动树条采收机(图5f),通过田间试验满足油茶果采收要求。
1.3.2 胶辊式
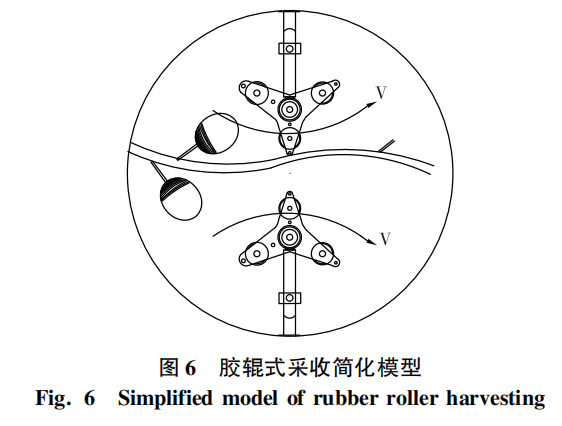
胶辊式是通过上下胶辊组件连续回转与自转夹紧油茶果,使其在旋转胶辊的撞击与拖拽夹持作用下脱落,具有良好的滚动性,耐摩擦,对接触物体的损伤较小,同时具有较强的适应性(图6)。
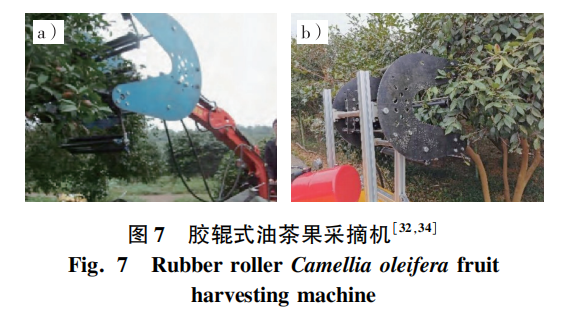
饶洪辉等为解决油茶果机械化采收过程中的花苞损伤问题,设计了一种胶辊旋转式油茶果采摘末端执行器。胶辊材质表面光滑,降低了在采摘作业过程中对花苞的损伤。为提高胶辊旋转式油茶果采摘末端执行器的工作效率,通过试验确定了最佳的工作参数,设计了液压驱动式油茶果采摘机(图7a),与电动胶辊旋转式油茶果采摘相比,转速提高了83.33%,平均采摘效率为210个/min。王玉龙等对现有的油茶果采摘装备难以在油茶林间灵活作业的问题,设计了一款胶辊式轻便电动液压油茶果采收机(图7b)。
1.3.3 梳 式
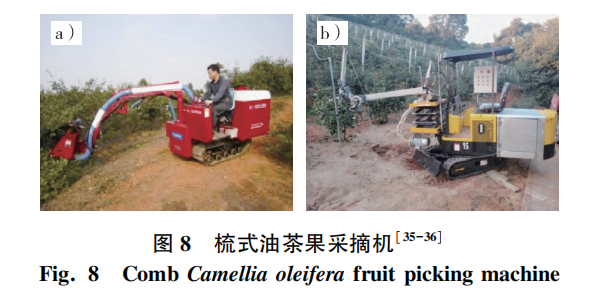
梳式是利用齿梳间距与油茶果直径的大小关系,在外部拉扯作用下带动油茶果做加速运动脱离树枝束缚掉落。梳式油茶果采收装备能够对采摘目标施加多方向作用力,减少对花苞的损伤。高自成等设计了一种梳式油茶果采摘机(图8a),通过现场采摘试验,验证了梳式采摘机构和多自由度采摘臂设计的合理性,为开发不同形式的梳式油茶果采收机研发提供了参考。伍德林等研究了不同品种油茶生物力学特性,研发了一种梳式油茶果采摘机(图8b),该机在采摘作业时能对油茶果产生多种作用力,实验证明具有较好的采摘性能。
油茶果机械化采收应用进展缓慢,已取得的部分研究成果目前基本处于试验阶段,与油茶果采收实际需求还有差距。一方面是油茶主要生长在丘陵山地,地形复杂、道路崎岖不平,对采收装备的通过性和稳定性要求高。现有机械化采收装备体积较大、“上山入林”能力弱,难以在丘陵山地等复杂工况下高效作业。另一方面是林机林艺融合度低,当前的研究成果只适用于林机林艺融合度高的特定油茶林,现阶段大部分油茶林栽植不规范、油茶株行距布局不合理等因素都在一定程度上制约了油茶果机械化采收装备的应用与推广。
1.4 油茶果采摘机器人
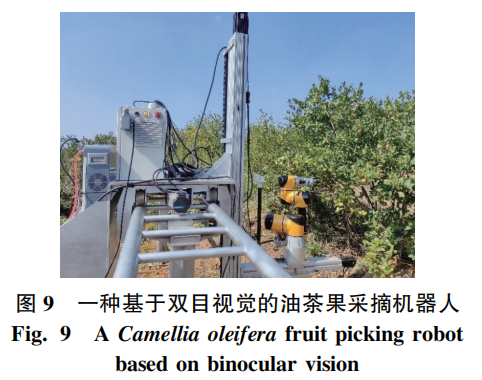
随着新技术的发展,科研人员在油茶果采收方面进行了智能化探索,开展了油茶果采摘机器人相关技术的研究。南京林业大学研发了一种基于双目视觉的油茶果采摘机器人(图9),对油茶采收的智能化识别与定位方法、油茶采收机器人视觉与路径规划技术进行了研究,实现了室外环境下油茶果的高效、精准采摘。高自成等对油茶果采收机器人采摘头进行力学仿真和关键零件有限元分析,初步验证了机器人采摘头的可行性和安全性,并对试验结果进行了极差分析和回归分析,分析结果一致。王勇桦等对油茶果采摘机器人伺服系统进行设计,构建了数学模型并开展了可靠性验证。赵新芳等发明了能自主在田间行走并通过相机完成果实识别与定位,再通过六自由度机械臂完成采收作业的基于机器视觉的油茶果采收机器人。牟向伟等基于双目视觉,发明了一种能够自主完成行走、识别、采摘等作业的油茶果智能采摘装置。现阶段受油茶林立地条件复杂、树体管理不规范、油茶品种多等因素的制约,科研人员对油茶果采收机器人的研究较少,主要是将机械动力学、自动控制、视觉识别等技术相融合,在智能化油茶果采收领域进行初步探索,还处在实验验证阶段,尚不能进行实际应用。油茶果采收机器人研究是解决未来人口老龄化、劳动力短缺问题的关键。
针对目前存在的问题,应构建全新的油茶“栽植-管护-收获”智能采收模式,建设利于开展智能化采收的基础条件,再与果实的识别与定位、多自由度机械臂等智能化新技术相融合,油茶果采收机器人应用才会有新的突破。
02油茶果机械采收关键技术
2.1 采摘执行器技术
采摘执行器是油茶果采收机的核心部件,其技术水平直接影响采摘效率、花苞损伤率以及树体损伤程度。按照与油茶果是否接触分为非直接接触和直接接触两类(表1)。
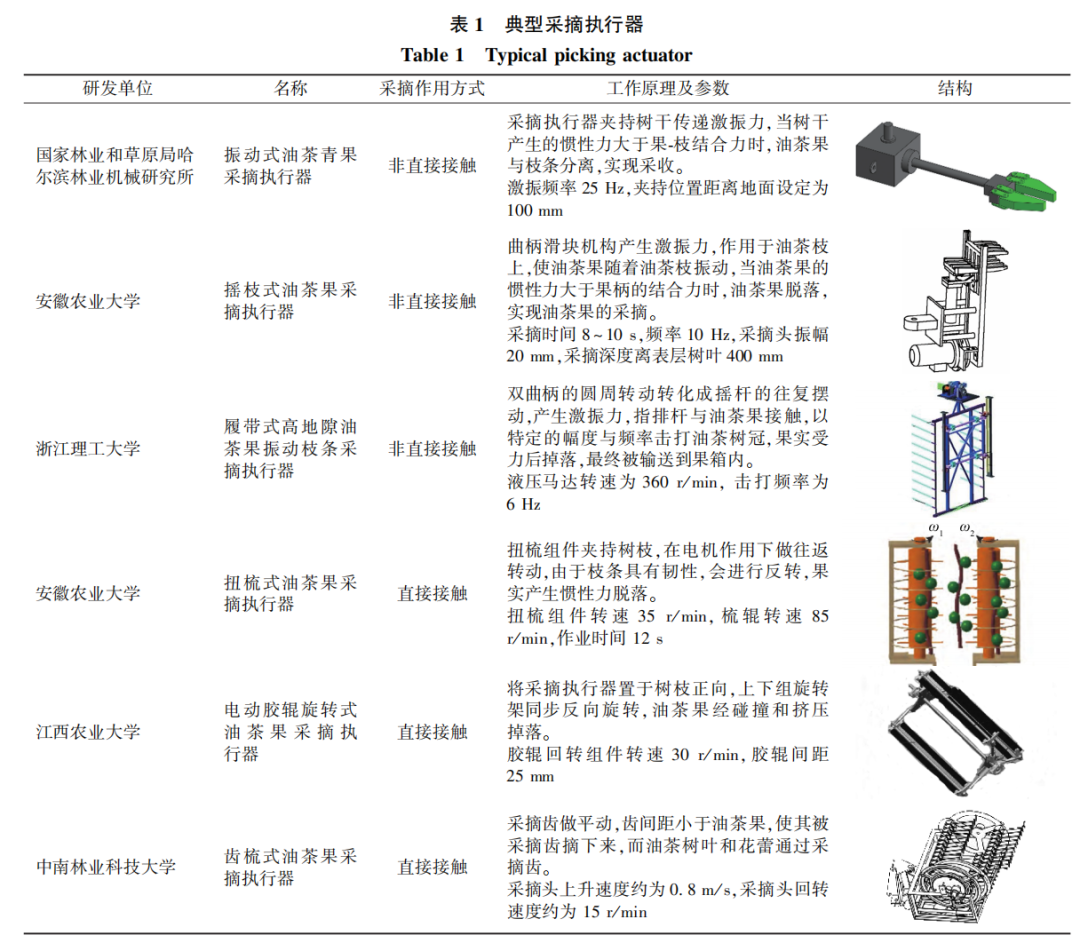
非直接接触有振动树干式和摇枝振动式,通过对树干的夹持或对树枝的摇晃实现果实的掉落,广泛应用于国内外的林果采收,作业时执行器不与果实接触,而是与树体接触。现阶段大多数采用基于激振原理的非直接接触方式,开发了多种结构形式的执行器,具有激振能量大、传递范围广、作用于果实数量多、采摘效率高等特点,但总体结构相对复杂,质量大,能量利用率低,对激振的振幅、频率、时间等有较高的要求。
直接接触主要有辊式、梳刷式和击打式等,通过夹拽、梳拉和击打等方式直接作用于果实进行采摘。采摘时能量损失少、装置体积相对较小,但采摘效率低、出现树体内部果实漏采现象,易受树体结构和缠绕树枝的影响。
采摘执行器技术是油茶果采收机械研究的热点,现有研究缺乏基础科学理论对采摘执行器的工作形式及结构进行指导,对“机器-树体”互作机理并未明晰,导致技术更新升级缓慢。未来采摘执行器开发将融合“油茶品种-修枝管护-结构形式”,实现精准高效采摘。
2.2 采收机械臂关键技术
采收机械臂是采摘执行器与动力底盘的连接部件,主要作用是将采摘执行器移动到适宜的作业位置,性能直接影响采收效率。
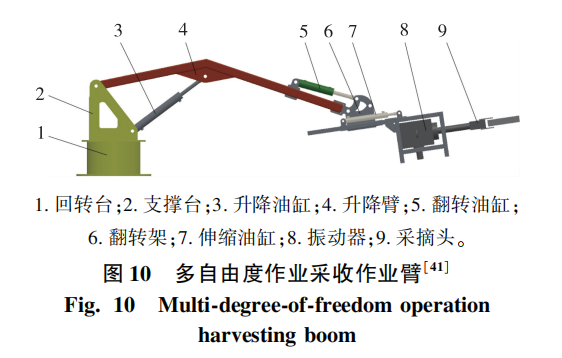
汤晶宇等发明了一种多自由度作业采收作业臂(图10),通过机械臂回转、伸缩、悬吊设计,提高了油茶果采收机在空间狭小、栽植密度大的油茶林作业效率。高自成等设计了一种液压驱动串联式机械臂,根据油茶果的分布和树冠形状绕回转轴转动进行采摘作业,作业空间较大; 还发明了一种高精度采摘机械臂,解决了油茶果采摘机采摘臂升降精度低导致部分高度油茶果漏采的问题,提高了采摘效率。刘银辉等发明了一种多自由度采摘机械臂,能够实现不同位置的采摘作业,具有操作灵活、协调性能好、实用性强的特点。李帅等通过对采摘机器人机械臂作业空间的分析,验证机械臂结构设计的合理性,为采摘机器人作业系统研发提供依据。张立勇等发明了一种履带式油茶果采摘机械臂,对空间运动轨迹进行分析,得出了影响工作效果的相关因素。范子彦等为实现油茶果的自动化采摘,研发了一种推摇式油茶果采摘机械臂,分析作业空间,轨迹拟合规划,提出了一种改进灰狼算法(IGWO),目的是实现无损夹持。
采收机械臂结构研究主要集中在旋转、伸缩、折叠或相组合等方向,控制方式研究涉及手控、自动控制和手自一体等技术。未来将通过开展模块化多自由度悬吊、轻简手扶旋转伸缩、长距离柔性、智能自动定位等机械臂研究,实现高灵活度、一次性定位精准、大范围柔性等采收功能。
2.3 采收动力底盘技术
采收动力底盘用来承载油茶果采收机具,性能会直接影响整机的作业效率和质量。汤晶宇等针对油茶栽植困难立地条件,设计绕轴摆轮结构,研发了一种六轮铰接式动力底盘,应用于多自由度振动树干式油茶果采收机。李福来为提高机械化采收装备的安全性和机动性,提升底盘的行走稳定性与地面适应性,设计了一种新型油茶果采摘机三角橡胶履带轮底盘。钱寅根据油茶果振动枝条采收机需求,设计了一种高地隙油茶果收获机底盘。蔡岗础设计了基于振动式油茶果采收机的三角橡胶履带轮底盘。不同类型采收机底盘见表2。
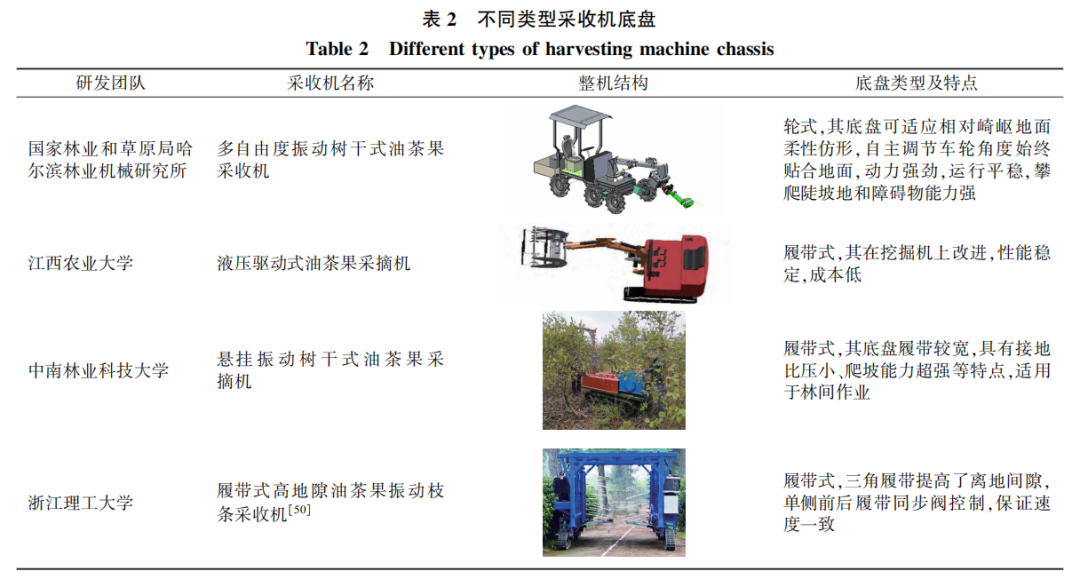
我国油茶果采收机的底盘研发较少,研究主要有履带和轮式两种形式。现阶段油茶林栽植密度大、地势高低起伏、立地条件复杂,对动力底盘通过性、稳定性提出了更高的要求。结合不同类型的采收方式,科研人员开展了小型履带车改制、三角履带、高地隙车架、多轮铰接等研究。现有动力强劲、越障能力强、稳定性好的底盘大多体积较大,无法开展油茶果采收作业。基于油茶林内作业环境与采收需求,亟须规划建设油茶林宜机化作业道路,同时攻克底盘轻量化、模块化等技术,研发小巧灵活、结构简单的油茶果采收专用动力底盘,实现采收装备“上山入林”。
03油茶果采收智能化技术
随着大数据、机器视觉等新兴技术的快速发展,智能化技术广泛应用于机器人采收。突破复杂工况下的油茶果采摘机器人成熟度检测、图像识别、果实定位等关键技术,将有助于推动油茶产业的可持续发展。
3.1 油茶果成熟度检测技术
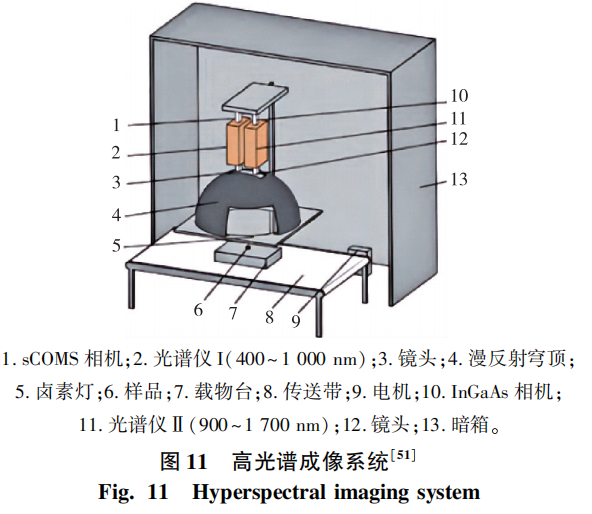
地区、天气、气候、土壤肥力等因素对同品种的油茶果成熟期影响很大。当前,我国对于油茶果采收期的判断主要依靠节气和经验。近年来,国内外学者针对油茶果成熟度检测技术做了相关研究。胡逸磊等为提高油茶果采收期判断的准确性,利用其光学特性来判断成熟度,提出了一种高光谱成像油茶果成熟度检测技术(图11),突破了传统的“经验式”油茶果成熟度判断方式,实现了油茶果智能化成熟度检测。
叶甜甜等为确定最佳的油茶果采收期,分析测定两种不同成熟度油茶果的营养物质、表型性状和油脂脂肪酸的变化情况,发现不同成熟期果实的单果质量、含水率、出籽率和出仁率变化情况不同,验证了不同品种的油茶果最佳采摘期差异化特性。姜洪喆等为解决不成熟、霉变等劣质油茶果影响茶油质量的问题,基于深度学习和高光谱检测技术,研发了智能油茶果分选设备,通过将不同成熟度油茶果的深度学习简化模型导入分选设备的主控制器中,实现优果和劣果的智能检测与分选,提高茶油品质。油茶果的含油率、组织结构和营养物质都会随成熟度的变化而变化,因此,如何无损高效地检测油茶果成熟度是未来油茶行业的重点问题,对油茶果采收具有指导意义。过早地采摘油茶果由于油脂转化较差,将降低茶油的产量,还会造成茶油品质差,而油茶果过熟时会出现开裂、果仁散落难以收集的状况,造成不必要的经济损失。
当前国内外对其他果实成熟度检测的研究较多,但油茶果分布广、品种多等因素导致对油茶果的成熟度检测技术实际应用较少。
3.2 图像识别技术
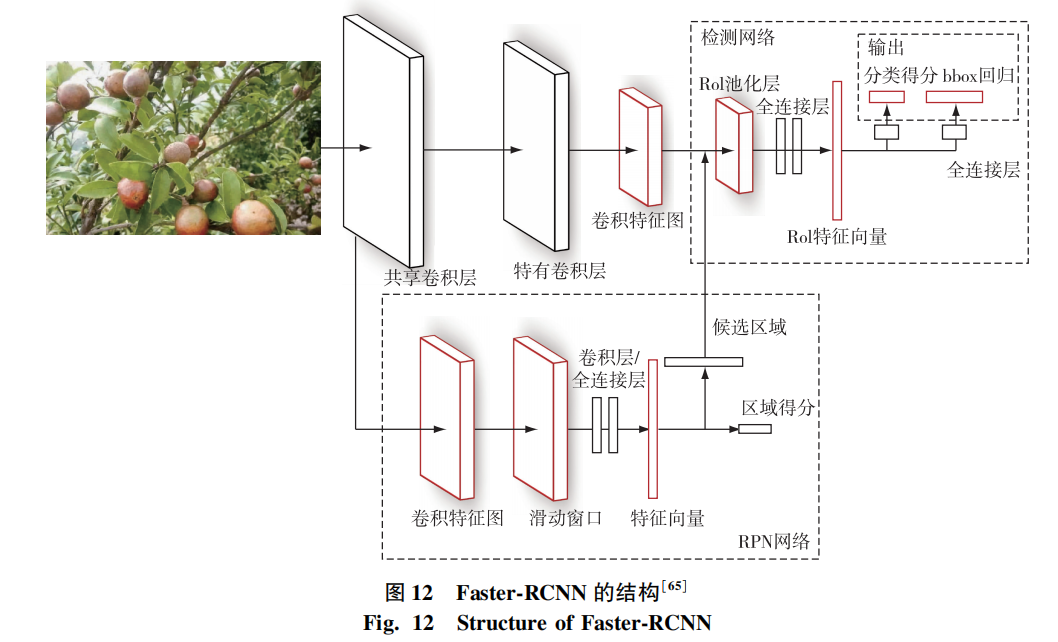
图像识别技术是油茶采摘智能化发展的基础。为解决油茶部分品种果实体积小、分布密集不易识别的问题,李昕等在经典Hough变换基础上添加了快速定位圆点、边缘预检测等模块,提出了一种改进的类圆形随机Hough变换算法,降低遮挡等因素对识别结果的影响,油茶果成功识别率最高可达90.7%,识别时间仅为1.3 s。棘玉等利用相机拍摄技术能快速实现油茶果图像特征的获取与校正,提出了一种可批量提取油茶果形状特征参数的方法,基于Mask R-CNN模型识别的准确率高达99.55%,该方法能有效解决大批量油茶果快速精准计数和形状特征参数的批量化提取等难题。马喆通过对成熟或未成熟油茶果图像的色差分析,提出了一种基于色差阈值分割的油茶果识别算法,识别率最高可达到83.3%。汪洋等开发了一种针对光照不均匀图像的优化分割算法,通过对光照不均匀图像进行亮度补偿再分割,解决传统算法难以处理光照不均匀成熟油茶果图像的问题,提高了成熟油茶果的识别率。陈斌等针对青色油茶果背景色差小、形状特征明显的特性,基于傅里叶描述子、Hu不变矩形状特征和BP神经网络识别技术,提出了一种油茶果识别算法,通过对提取的油茶果图像进行识别,最高识别成功率可达100%。首次将卷积神经网络应用于油茶果识别,采用Faster-RCNN交替优化训练方法(图12),可自动提取油茶果多特征进行识别。张习之等提出一种基于改进卷积自编码机神经网络的油茶果图像识别方法,平均识别准确率为90.4%,具有较高的识别准确率与学习能力。
油茶果图像识别技术在解决果实遮挡、光照不均、背景色差小、批量检测等问题上做了研究。近年来,基于深度学习的卷积神经网络应用较为广泛。实例分割是目标检测最先进算法之一,但目前处于实验室阶段,未能得到实际应用。油茶果图像识别技术的研究为后续油茶果采摘机器人的研发提供了理论基础。
3.3 果实定位技术
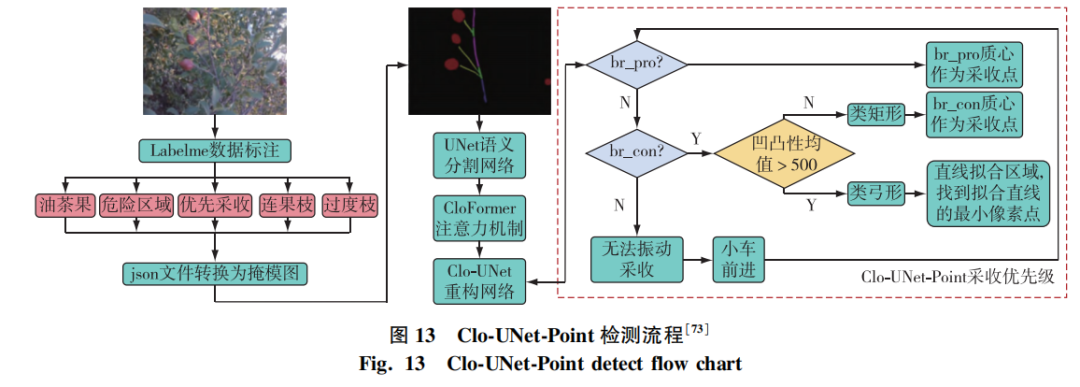
油茶果定位是实现机器人自动化采摘的关键步骤之一,其精准度是机器人采摘成功的关键。熊仕琦等基于深度卷积神经网络设计了一种双目立体视觉系统,实现复杂环境下的油茶果识别定位,具有更高的识别效率和更快的识别速度,在复杂环境下展示了其算法的优越性。宋怀波等针对油茶果体积小、密度大、难以在复杂背景下精准识别定位的问题,以YOLOv5s卷积神经网络为模型,以自然环境下的油茶果为检测目标,设计一种平均检测精度为98.71%的检测方法,具有较强的鲁棒性。陈志健等为降低自然环境下油茶果重叠对识别定位结果的影响,提出了以一种基于凸壳识别的分割边界优化方法。王伟等基于机器视觉设计了一种油茶果识别定位系统,为采摘机器人提供果实坐标,降低花果同期时采摘对花苞的影响。林洁雯收集了国内外的研究现状以及采集到的油茶果图像,提出一种基于立体视觉的油茶果在线识别与定位技术。石良德采用归一化灰度块匹配立体算法,通过计算油茶果在参考图像和立体图像的视差,得出其3D坐标,实现成熟油茶果定位,满足时效性要求。王金鹏等基于改进UNet模型(图13),针对非花果同期油茶果,提出一种侧枝振动采摘点定位方法,通过振动侧枝降低树木损伤,提高采收效率。
以上研究为采摘装置的研发奠定了基础,但我国油茶果采收智能化发展较晚,研究尚处于初步探索阶段,面临着诸多问题,例如林间作业环境复杂、深度相机在室外效果不理想等。随着三维激光传感器、图像识别算法及物联网等技术在采收领域的应用,油茶果采收智能化程度必将快速提升,果实定位技术将会广泛应用。
04存在问题与发展建议
4.1 存在问题
1)采收装备与油茶栽植管护林艺不融合。我国油茶栽植在丘陵山地,立地条件复杂,栽植模式不一,林间精细化抚育管护水平低。油茶林栽植未考虑宜机化,规模经营和以地适机等举措推广程度不够,林机林艺融合度低,导致机械化采摘研发推广困难。实现油茶果采收的机械化不仅需要研发采收装备,还需要宜机化栽植技术和良好的经营模式。
2)关键参数研究匮乏。不同品种以及同株树体生物特性存在差异,油茶树干、树枝、树冠形态、油茶果成熟期等差异对采摘效率的影响有一定规律,科研人员对其研究不够深入[74],同时对树体固有频率、果柄结合力、树体等效质量的研究较少,设计采摘执行器时对激振力、振动频率、振动幅值等参数大多凭借经验确定,直接影响油茶果采收装备的作业质量和工作效率,不能提供关键参数指导采摘机的研发。采收作业时树枝、树干、根系也会受到外力影响,对油茶树的生长、开花、结果影响尚不明确。
3)关键技术研究不足。便携式采摘机采后收集是一个急迫问题。目前油茶果收集主要依靠人工拾取,地面杂草石块环境差,人工劳动强度大。基于轻简、高效、兼顾油茶树体和作业环境等要求,开发高效率、轻简适应性能强的收集装备,是当前亟须突破的实用技术。
振动式油茶果采收装备激振力高效传递与夹持方式有关,当前对夹持部件结构、夹持装置与树体接触面材料等技术研究不足,导致树体损伤较大。
底盘在油茶林内灵活作业十分重要,是自走式油茶果采收机械化取得突破性进展的关键。自走式油茶果采收机械对动力底盘的体积、越障及爬坡能力、行驶稳定性和安全性都有较高要求,但对专用底盘技术研究较少。
4.2 发展建议
1)针对已有栽植现状,开展多种机型采收技术研究。油茶多在丘陵山地栽植,作业场景多样,油茶品系多,树体结构差异大,单一机型难以满足多场景采收作业。开发多种机型,研究便携手持采收、人机协同机械采收、轻简移动机械化采收和高效智能自行机械化采收,实现“适树适机、多机联合”采收作业模式。针对宜机化栽培模式,开展林机林艺深度融合的高效采收技术研究,围绕油茶林立地条件、油茶林结构、林内郁闭程度和产量,构建油茶株行距控制、油茶树体管理、机械作业林道等适合机械化采收的多因素宜机化栽培模式,分析油茶树体主干、冠形、枝条结构和果实分布等,提出适合机械化采收的油茶树体管护修剪技术。结合油茶果实成熟、水肥管理、生长调控技术,突破果实成熟一致性好、果柄分离力小的油茶果催熟技术,同时结合标准宜机化的栽培模式,开发林机林艺深度融合的油茶果高效采收装备,是近期油茶产业机械化采收的发展方向。
2)引导新建油茶林宜机化栽植和低产林宜机化改造,为机械化采收提供作业条件。改变油茶果采收机“一机全适”思路,装备的发展与宜机化作业环境相辅相成互相促进。目前油茶林机械化作业环境差,正确引导新建与改造油茶林宜机化建设,为机械采收提供良好的作业环境。加强政策扶持与引导,实施宜机化作业道路建设,宜机采收的树体修剪管护,制定油茶果机械采收标准等,探索出“机-树-地”相适的油茶产业良性发展模式,实现油茶产业高效可持续发展的全程机械化作业。
3)加强理论研究,突破关键技术。明晰油茶果机械化采收过程中执行器的工作参数与损伤率、采净率的互作关系,建立合理的机械-树体-果实模型。长期跟踪机械化采收后的树体生长、开花挂果情况,为机械化采收提供有力支撑。探明油茶果树系统力学特性,突破低损高效采摘执行器技术。分析动力底盘在林内复杂作业环境下,行驶作业过程中动力底盘与林地及其附着物的关键动力特性,攻克林地复杂立地条件动力底盘技术。
4)结合新兴技术在林果采收领域的应用,开展油茶果采收前沿技术探索。为解决油茶林光照变化、枝叶遮挡、果实重叠以及采摘过程中的晃动干扰、运动图像模糊等林果智能采收共性问题,研究复杂环境下果实-背景快速分割多传感融合方法,攻克果实高效识别与精准定位技术; 研究基于卷积神经网络、人工智能等技术的先进高效图像处理算法,建立多机械手复杂空间协同控制模型,解决油茶果采收作业空间内快速运动路径规划、多机械手之间碰撞、漏采等问题; 结合数字技术,不断探索智能化、物联网、大数据等技术,对采收数据进行实时监测,生成实时产量和花苞掉落分布云图,使智能采收作业维持在最佳状态。前沿的智能化油茶果采收技术将是本领域长期研究的热点。
展望
树木木射线不仅对树木水分运输及营养物质贮存具有重要作用,而且也显著影响着木材的物理力学性能、浸渍改性等应用。但由于木射线组织比量少、射线细胞尺寸小以及细胞壁形成时间跨度较长,现阶段木射线的微观构造、超微观构造与化学特征仍不清晰。根据木射线结构特征研究现状,针对当前存在的问题与不足,对木射线结构基础研究的发展趋势展望如下:
1)创新及完善木射线结构分析方法体系。推动木射线的微观构造、超微观构造的定量、高通量测试平台研发; 引入激光显微切割、高分辨原位成像等现代生物学方法,推进射线薄壁细胞的壁层组分研究; 形成木射线结构分析标准,提高数据信息的准确性与代表性,为全球树种的木射线结构特征科学数据积累提供方法支撑。
2)开展木射线结构的理论研究。突破木射线细胞壁模型构建的理论瓶颈,揭示木材多类型细胞的细胞壁多层级结构及其交互作用机制,阐明木材细胞壁微纳尺度空间结构及其对木材宏微观性能的影响机制,建成木材多级结构特征与构效关系数据平台,为创新木材高效利用基础理论提供空间网络信息支撑。
责任编辑:田亚玲
该文发表于《林业工程学报》2025年第5期。
